12 April 2024, Sergii Shykin, ISG F5G Secretary (Huawei)
The main goal of the F5G OpenLab is to demonstrate the advantage of F5G technologies, showing immersive speed of data transferring and low latency using processing operations in the cloud.
The following PoC has been performed between Fraunhofer HHI, the F5G OpenLab, Huawei, German Edge Cloud, and Denso Robotics. It shows the application of optical communication in industrial scenarios.
The basic function is that an object is placed on the robot arm, cameras are capturing the object, send the data to the cloud and an AI algorithm calculates the data and returns a command back to the robot, telling if the detailed 3D shape of the objects conformant to the specification or not. If the 3D shape is ideal, the robot places the objects on the conveyor belt. If not – then the object is dropped to a defect storage.
Figure 1 below shows a more detailed view of the solution and the architecture.
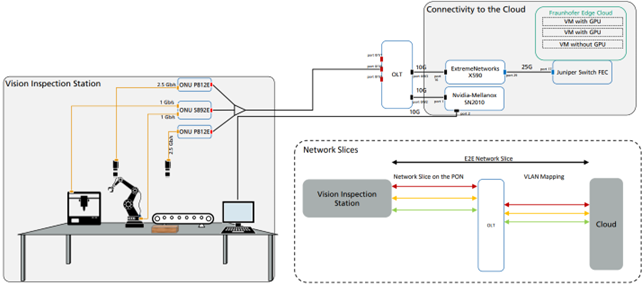
Figure 1: Architecture of Visual Inspection Station
The setup is equipped with 2 GigE Vision cameras that can capture videos suitable for vision inspection tasks. Each camera requires up to 5 Gb/s bandwidth. In this use-case, one camera was set to 2.5 Gb/s and the other one set to 1 Gb/s. The camera, robot, 3D printer for producing objects and statistics monitors are connected via an ONUs and an OLT. The data is sent to the cloud following the route depicted in Figure 1.
The set-up implements network slices between visual inspection station and the cloud that allows effective data exchange using several streams in parallel and it allows to have that communication isolated from other communication in the workshop.
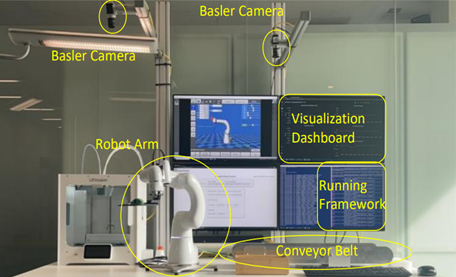
Figure 2: Physical setup Visual Inspection Station (VIS)
An AI model is running in the cloud. The AI model was trained to recognizes the objects placed on the robot’s arms and is able to recognize an object placed in different rotation and different light brightness and intensity.

Figure 3: Faulty(left), non-faulty (right) objects
The F5G PoC demonstration has been (or will be) demonstrated on several occasions as part of planned online events and face-to-face meetings, such as:
- F5G Workshop at ECOC 2023, Glasgow, Scotland, October 2023
- Digital with Purpose Event, Lisbon, Portugal, October 2023
- NetworkX Event, Paris, France, October 2023
- COP28, Dubai, UAE, December 2023
- Hannover Messe 2024, Hannover, Germany
To demonstrate this project, please play the video below.

Embedded playable video